IntelliLift RoboNavigator
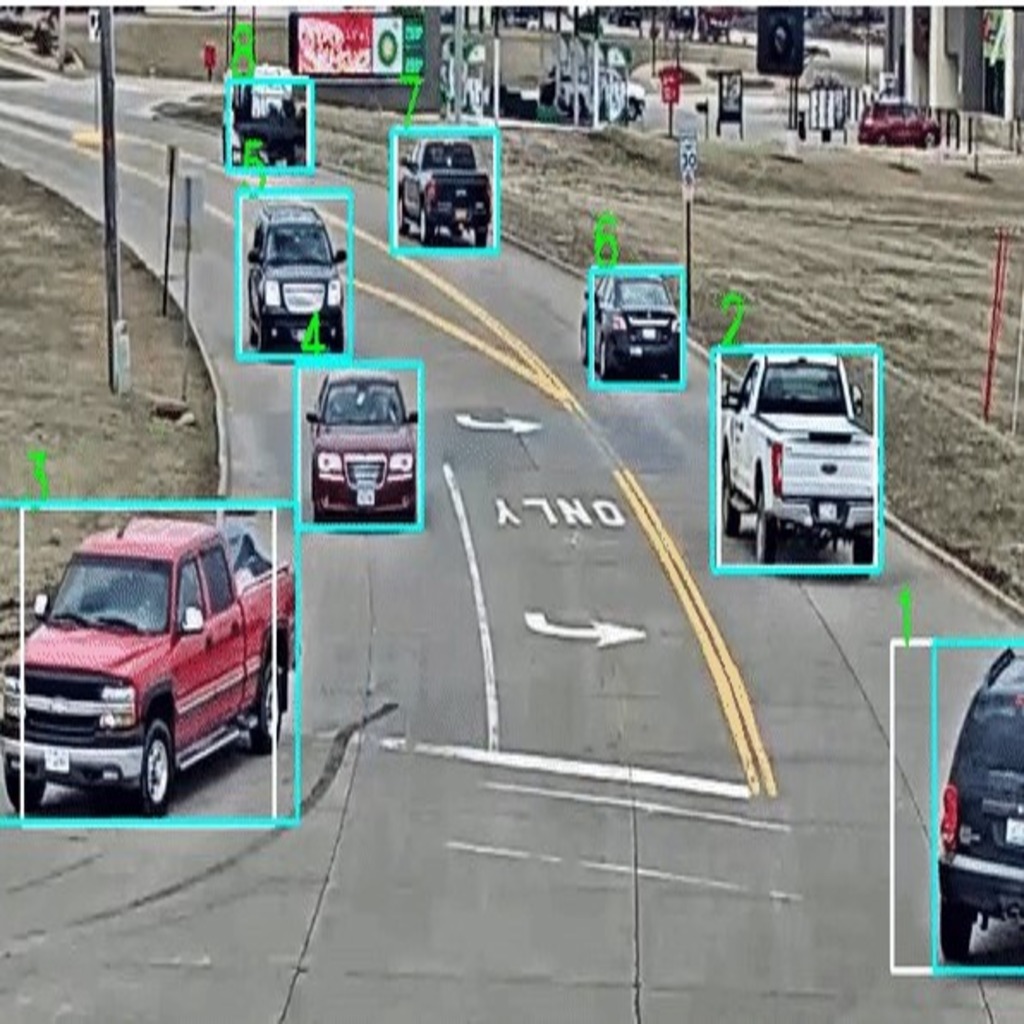
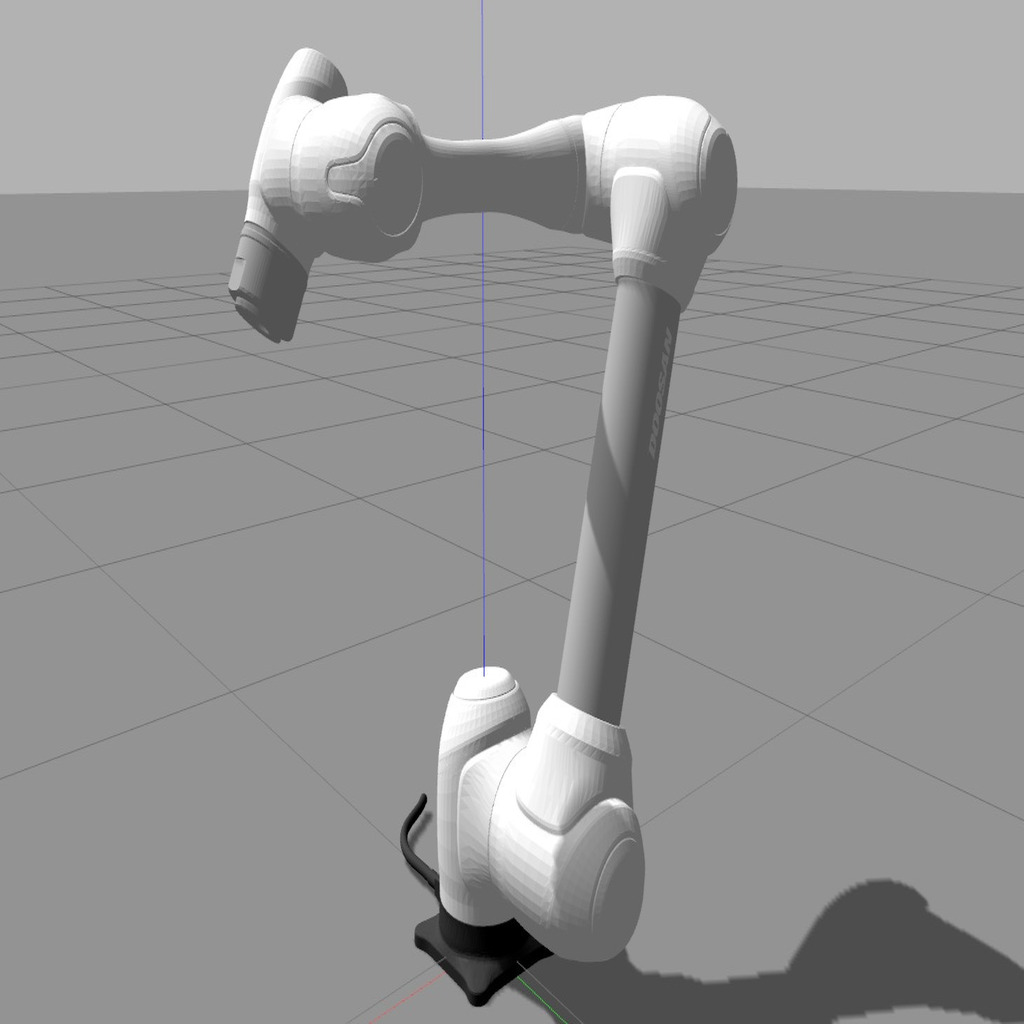
A robotics project that integrates a robotic arm mounted on a mobile platform to autonomously detect, navigate towards, and manipulate(lift) objects based on natural-language commands using 6D pose estimation of the object. The project will utilise ROS, Gazebo, ArUco Markers, 6D pose estimator and LLMs.